Styrning av H-robotar
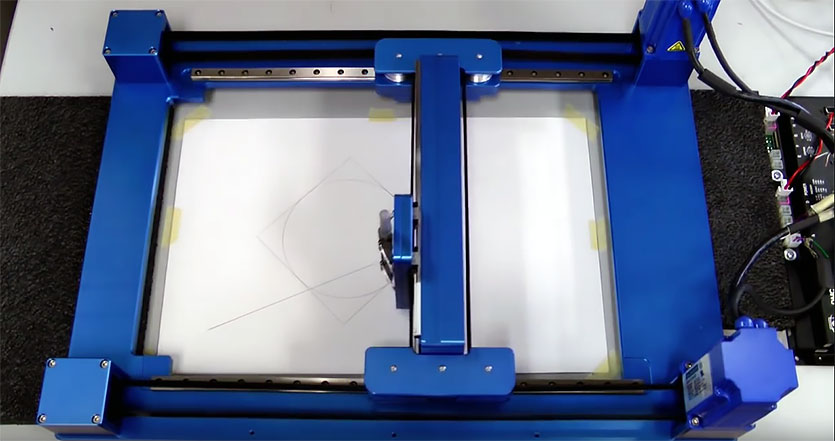
Det finns många applikationer som kräver förflyttning i ett plan, eller rörelse längs två vinkelräta axlar. Ett sådant tvådimensionellt system kan utrustas med ytterligare motorer för att öka antalet frihetsgrader. Denna typ av tillämpningar återfinns i allt från positionering av prover för mikroskop och 3D-skrivare till förpackning och materialdispensering. Det vanligaste sättet att åstadkomma rörelse i ett plan är att använda en maskin baserad på ett XY-steg eller ett gantrysystem. Denna typ av system kan ha många nackdelar som täcks senare i denna artikel. Ett alternativ till dessa typer av maskiner är H-roboten, vilken har många fördelar jämfört med XY-steg och gantrysystem. Denna artikel diskuterar för- och nackdelar med att använda en H-robot för plana rörelser såväl som Galils DMC-40×0-firmware för H-robotar. Läs mer
