Små och långsamma rörelser, ett problem inom virtual- och augmented reality
En viss förskjutning av vad man ser och vad som sker i verkligen går inte att komma ifrån helt och hållet inom virtual- och augmented reality men graden kan variera. Glapp kan däremot undvikas helt och hållet. Glapp uppstår om systemet inte känner av små och långsamma rörelser eller om användaren är helt eller delvis orörlig. Graden av tidsförskjutning och eventuell förekomst av glapp kan innebära problem inom vissa applikationer om systemet används för kritiska moment.
Detektering av rörelser, graden varierar med hårdvaran
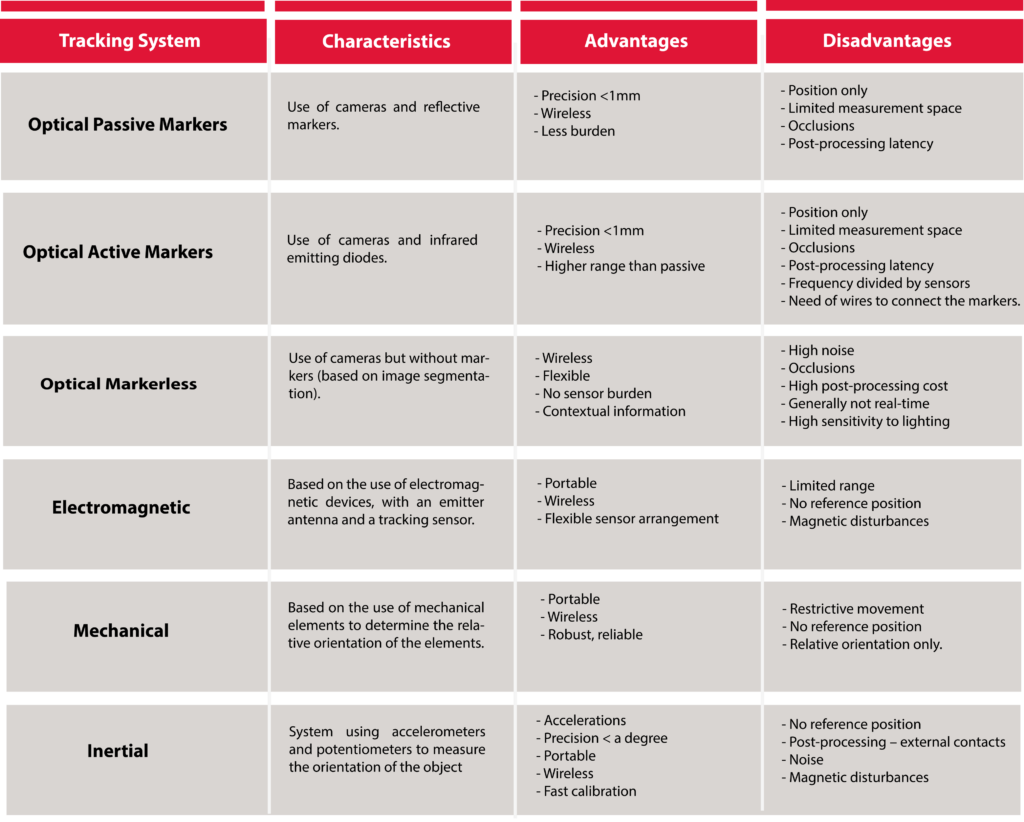
Systemen för rörelsespårning bygger på alternativa metoder och hårdvaror med helt skilda tekniker för att identifiera, följa och erhålla användarens positioner.
Vilket system som är bäst val beror på hur stor noggrannhet och förmåga till realtidsinformation som är nödvändig, hur systemet skall användas och applikationen ser ut, vad syftet är med utrustningen och vem som skall använda systemet. Andra betydande faktorer är hur utrymmet är utformat där utrustningen skall användas och behovet av portabilitet.
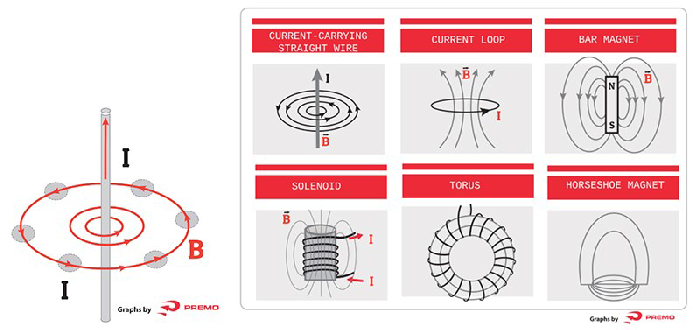
Elektromagnetiska system eller magnetiska system med 3D spole
Dessa system är baserade på elektromagnetism och beskriver interaktionen mellan magnetfält och el. Här används en emitterantenn som basstation för att mäta avståndet mellan objektet och basen genom att placera spårningssensorer i VR glasögon och handskar eller joystick. Från rotations- och positionsinformationen som erhålls i systemet så kan det elektromagnetiska spårningssystemet beräkna objektets position och orientering exakt och i realtid.
Tillvägagångssättet har stora fördelar eftersom det inte existerar problem med ocklusion och potentialen för tekniken är enorm inom både virtual- och augmented reality. Nackdelen med systemet är att detekteringsområdet begränsas till området kring sändaren och att magnetfältet kan påverkas om det finns metallobjekt i närheten.
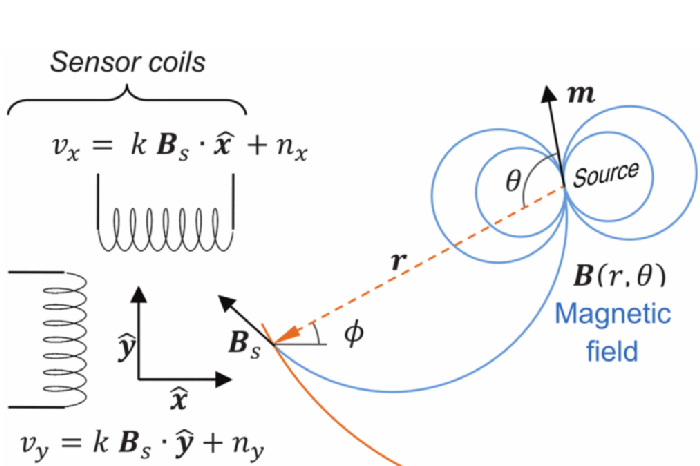
En djupdykning om hur systemet fungerar illustreras kanske enklast med Faradays lag som anger när en mottagarsensor rör sig inuti ett växlande (AC) magnetfält B (r, T) induceras en spänning proportionell mot vektorn eller tvärsnittsprodukten av tvärsnittslindningsområdet och magnetfältets intensitet i varje lindning och genererar N gånger den totala spänningen över spolarna (varvid N är numret på svängningar av lindningen). Denna inducerade spänning ger omedelbart mätningen av rotation (ɵ) mot referensemitterspolarna och läget (som modulen för den resulterande vektorn) i förhållande till modulen för den emitterande vektorn (r).
Trackingsystem med accelerometer, gyro och magnetometer
Mekaniska system var bland de första spårningssystemen som någonsin använts. De är baserade på den direkta mätningen av objektets orientering med elektromekaniska potentiometrar. Dessa system har inga externa krafter och därmed inga ocklusionsproblem, eftersom det inte finns något som påverka mätning och orientering av objektet. Utöver detta är systemet snabbt och de är bärbart.
En stor nackdel beror på systemets fundamentala egenskaper, utrustningen är rigid vilket gör den svårare att använda i många fall då rörligheten blir begränsad. Det är också relevant att systemet läser av den relativa vinkeln men att det blir stora svårigheter med glapp och eftersläpning när objektet står stilla, vänder, flyger eller hoppar.
Spårning med hjälp av tröghetsmoment
Tröghetsspårningsanordningarna är baserade på accelerometrar och gyroskop. Tröghetssensorn placeras i objektet som spåras för att mäta dess orientering. Med uppskattningstekniker, såsom Kalman-filtrering, fusionshastighet, tilt (gravitationvektor) och med magnetometrar för att få bättre data på vägen. Beräkningarna kan ge relevant kumulativa fel, ett alternativ är därför att kombinera vissa tröghetssystem med andra spårningsenheter.
Spårning med optiska system
Här sker spårning av användarens rörelser genom bildinformation från kameror och passiva eller aktiva markörer på objektet. Kamerorna måste alltid vara kalibrerade för att man skall få korrekt och korrelerad information av användarens rörelser genom markörernas position som är relativ. Det finns tre olika tekniker inom som skiljer de optiska systemen åt:
Optiska system med passiva markörer
Dessa rörelsespårningssystem baseras på en uppsättning fasta höghastighetskameror som för triangulering av markörpositionerna. De passiva markörerna är täckta med reflekterande material och infraröd belysning belyser markörerna under inspelning. För att markören skall spåras korrekt måste minst två kameror fånga positionen samtidigt. Eftersom det inte finns någon skillnad mellan markörerna, så ger systemet en uppsättning omärkta punkter i en tredimensionell arbetsyta. Under efterbehandling identifieras och klassificeras punkterna för att ge mening åt 3D-punkterna. Huvudproblemet med optiska passiva system är den möjliga exkluderingen av de passiva markörerna men även att positionsinformation underpresterar.
Aktiva markörer för optiska system
Dessa markörer har vanligtvis infraröddioder där ljuset emitteras av markörerna så att kamerans hastighetsfrekvens divideras med antalet sensorer som systemet behöver upptäcka. I det här fallet har systemet begränsad mätfrekvens men behöver mindre efterbehandlingstid eftersom det är möjligt att identifiera varje enskild markör. Trots det så har optiska system med aktiva markörer samma problem som med passiva markörer, även här förloras viss information när eventuell ocklusion av markörerna inträffar.
Utan markörer
Här undviker man användning av extraelement i detektering av objektet i rörelse genom att analysera bildinspelningen, segmentering och bearbetning för att extrahera positionen för objektet som ska spåras.
Rörelsedetektering har en central roll och man bör ta hänsyn till om förekomst av glapp och hur stor förskjutning som är acceptabel för aktuell applikationen.
