Förarlösa fordon i fokus på KTH:s KEXPO!
Vårens avgångsstudenter i mekatronik, bjöd under två dagar i maj in till en innovativ och intressant uppvisning i konsten att driva och manövrera förarlösa fordon. Under eventet samsades mängder av fordon med Pick and Place och robotar. Här demonstrerades självreglerande styrsystem tillsammans med lösningar för drift och manövrar på många smarta sätt.
Som sponsorer av motorer & motorstyrningar besöker vi alltid KTH under KEXPO för att ta till vara på den fina möjligheten det innebär att få träffa unga innovatörer och talanger som visar upp arbeten de har tagit fram inför sin kandidatexamen.
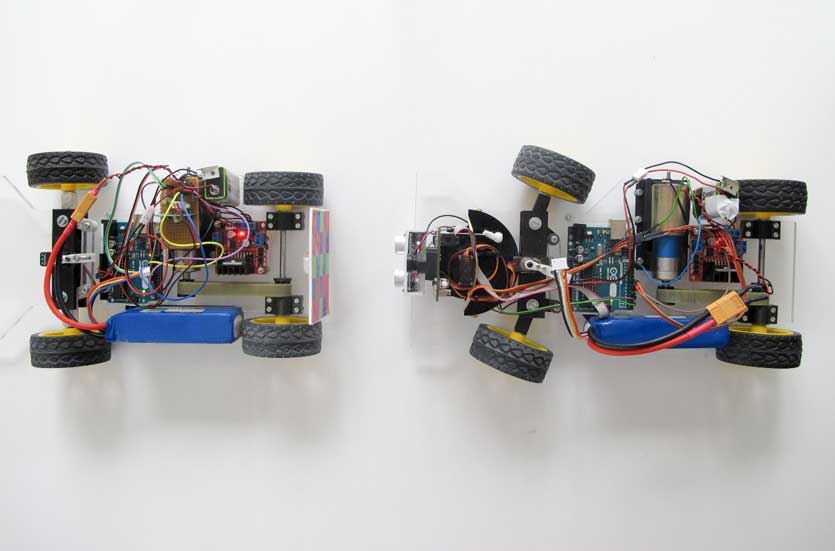
Under årets KEXPO träffade vi bland annat Joakim Storfeldt och Simon Tönnes som visade upp sitt arbete med konceptet platooning. Joakim och Simon berättade att examensarbetet syftade till att bevisa konceptet som ett fungerande sätt att öka kapaciteten på våra motorvägar. Genom platooning kan avståndet mellan fordon minskas eftersom acceleration och inbromsning sker automatiskt samtidigt hos flera fordon. Kandidatarbetet jämför förbättringen i respons och pålitlighet när olika sensorer kombineras och konceptet demonstrerades på KEXPO, där en av bilarna använde en rörelsekamera kombinerat med ultraljudssensor för att följa efter måltavlan som var fäst bak på den andra bilen.
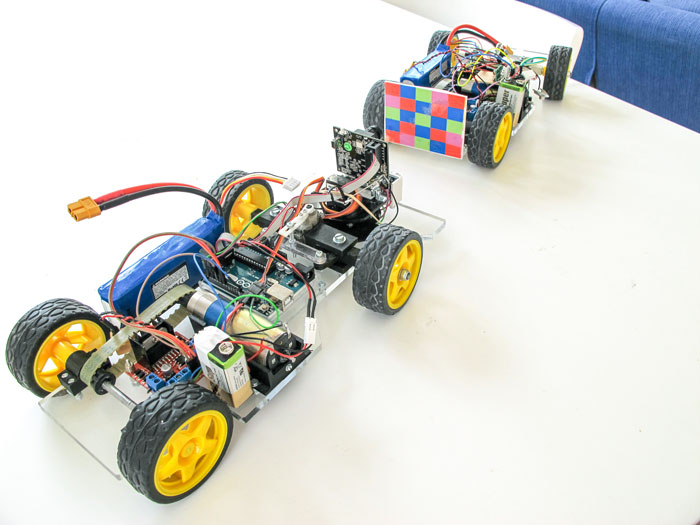
Projektet gav bra resultat säger Joakim, de lyckades bevisa en förbättring i avståndsbedömning på nära håll. Förbättringen i avståndsbedömning ledde till att bilarna kunde köra närmre varandra utan att krocka och tappa sikte på måltavlan, då en kombination av rörelsekamera och ultraljudssensor användes jämfört med då endast en rörelsekamera utnyttjats.
Det här konceptet kommer förmodligen att användas alltmer framöver allteftersom vi går över till självkörande fordon. Vi önskar studenterna all lycka i framtiden och hoppas att vi får träffa många av dem framöver i fler spännande sammanhang!
