7 tekniker för att åstadkomma linjär rörelse med elmotorer
Många applikationer för elmotorer handlar om att omvandla en roterande rörelse till en linjär rörelse, t.ex. i ställdon, XY-bord, zoom eller fokus i optiska tillämpningar m.m. Detta kan göras på många olika sätt, med olika för- och nackdelar, och som lämpar sig för olika applikationer. Väljer du fel metod kan du få problem med för dålig noggrannhet, för låg hastighet eller en för dyr totallösning. Väljer du istället rätt kan du bygga en produkt med bättre prestanda än konkurrenternas eller som är prismässigt mer konkurrenskraftig. I bästa fall till och med en kombination av dessa. I denna artikel tittar vi på några vanliga metoder för att åstadkomma linjära rörelser med elmotorer.


Webinar: Olika metoder för återkopplad styrning av stegmotorer
Lär dig skilda metoder för återkopplad styrning av stegmotorer. Stegmotorer används i många olika typer av tillämpningar eftersom de är kostnadseffektiva, enkla att köra och erbjuder högt moment vid låga hastigheter. Tyvärr har de även några nackdelar såsom förlorade steg, lågt moment vid höga hastigheter, resonans och hög strömförbrukning. För att bättre hantera dessa nackdelar har Galil tre olika metoder för att köra en stegmotor i en återkopplad servoloop: Slutpositionskorrigering, återkopplad mikrostegning och att köra stegmotorn som en 2-fas borstlös motor.
Använd gärna det inspelade webinariet som introduktion, här visar Galil Motion Control hur de olika metoderna fungerar.
Är du mer hjälpt av Galils white paper om ämnet? Ladda ned ditt eget exemplar via länken.

Så styr du en Galil motorstyrning från en Raspberry Pi

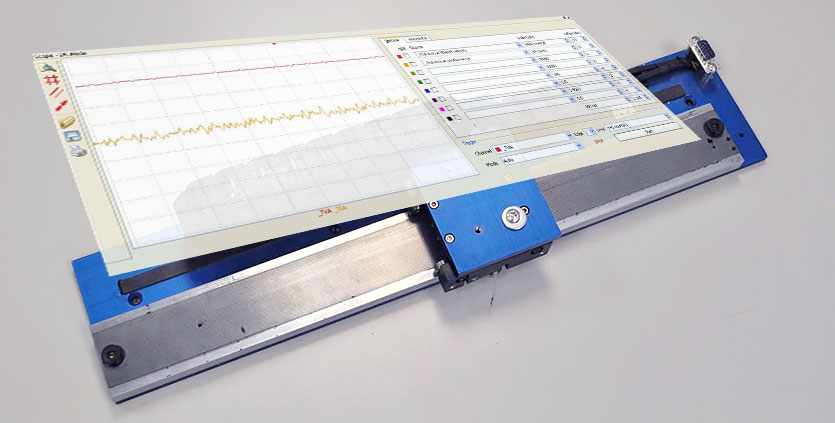
Figur 1: Touchskärm och motorstyrning
Ett HMI (Human-Machine Interface) eller användarinterface behövs i många motorstyrningstillämpningar. Dessa enheter används för att ge användare en möjlighet att instruera en maskin hur den ska bete sig, men utan behov av en komplett PC. Ett HMI är ofta touchbaserat vilket gör att de kan placeras på produktionsgolvet och användas av tekniker direkt vid maskinen. Det finns mängder med olika HMI-produkter och de kan ibland kosta tiotusentals kronor. Med ankomsten av Raspberry Pi har det dykt upp ett litet men kraftfullt alternativ. Tillsammans med Raspberry Pi Foundations nya 7″ display och Galils API utgör denna kraftfulla trio grunden till ett kostnadseffektivt men kraftfullt HMI som kan anpassas till att fungera med alla sorters motorstyrningsbehov.
Ökad prestanda med återkopplade stegmotorer
Moderna motorstyrningar kan inkludera möjligheten att köra stegmotorer med pulsgivare som återkoppling, vilket resulterar i en äkta återkopplad servoloop. Denna typ av motorstyrning liknar mycket hur man styr vanliga 3-fas borstlösa servomotorer, där de tre faserna är förskjutna med 120 elektriska grader. Hos stegmotorer är de två faserna förskjutna med 90 elektriska grader. Några av fördelarna med återkopplad styrning av stegmotorer är betydligt jämnare hastighet, reducerad effektförbrukning jämfört med oåterkopplade stegmotorer och betydligt högre moment vid låga hastigheter än traditionella 3-fas BLDC-motorer. Läs mer

Riktverkan hos mikrofoner
En mikrofon kan ha varierande upptagningsförmåga beroende på riktningen hos det infallande ljudet. Karaktäristiken kan vara en ofrånkomlig följd av mikrofonens konstruktion eller en medveten design för att erhålla egenskaper för speciella ändamål. En del mikrofoner har dessutom variabel karaktäristik. Man brukar åskådliggöra detta grafiskt i diagram, karakteristikor. Här tänker man sig att mikrofonen är placerad i centrum och med sin framsida riktad uppåt i diagrammet.

Allt du behöver veta om kontrastjustering vid val av display
Displayer behöver tillräckligt hög kontrast för att synas bra och vara funktionsdugliga. Det är det omgivande ljuset som sätter förutsättningarna för vilka displayer som fungerar i varje enskild applikation.
En displays kontrastegenskaper har en liten variation från olika tillverkningsbatcher. I konstruktionsfasen av en ny produkt bör denna batchrelaterade variation i kontrastegenskaper kompenseras med kontrastjustering. Det räcker inte att låsa kontrastspänningen med ett fast resistorvärde utan justering av kontrastspänningen behövs.


White Paper: Moderna magneter och korrosion
Magneter av neodym är de starkaste permanentmagneter som existerar idag. Men neodymmagneter är känsliga för korrosion. En magnet som drabbas av korrosion kan bli avmagnetiserad med konsekvensen att magneten helt enkelt upphör att vara en magnet. Och det kan ske även när magneten redan är i bruk och kanske används i exempelvis en motor eller i ett vindkraftverk. Men det finns metoder för att förhindra problemen, innan de dyker upp.
I det här white paperet förklarar vi vad röd och vit korrosion är och hur man undviker att fenomenen ska inträffa.

Så väljer du rätt spänning för din stegmotor
Du har valt en stegmotor utifrån motortypens många bra egenskaper. Du har valt rätt storlek utifrån momentkurvan i databladet. Du har valt lindning utifrån den spänning och ström du har att tillgå. Du har kopplat upp, testkört – och förtvivlat.
Det står ju klart och tydligt i databladet att spänningen ska vara 4,5 V, så varför kommer motorn inte upp i varv, inte ens i närheten, vid denna matningsspänning? Lugn, vi hjälper dig att reda ut begreppen och välja rätt matningsspänning för din stegmotordrift.