
Om positionsmätning, vi jämför 7 olika tekniker
Exakt positionsmätning och återkoppling av rörelser kan vara avgörande för en maskins prestanda, oavsett vilket syfte maskinen egentligen har. Om en mätteknik lämpar sig eller ej kan dels bero på hur precisionskrav & repeterbarhet ser ut och hur integrationen kan göras. Men beräknad livslängd, miljö och under vilka förhållanden maskinen ska användas kan ha lika stor betydelse. Det är heller inte ovanligt att man som ingenjör dessutom kombinerar olika metoder för att nå den nivå av noggrannhet och tillförlitlighet som behövs.
Det är här vi kommer in i bilden. Som de motor- och rörelsespecialister vi är, har vi tagit fram en guide där vi går igenom hur 7 vanliga mättekniker fungerar, vilka egenskaper de har och hur väl de lämpar sig i olika applikationer.
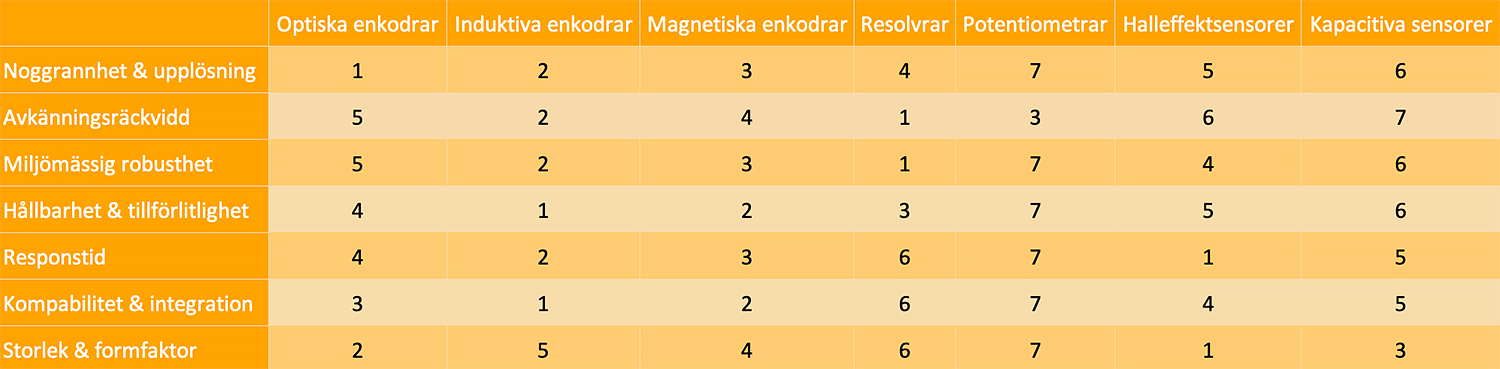
Vilka egenskaper är viktigast? Vi rangordnar teknikerna när det gäller noggrannhet & upplösning, responstid och 5 andra egenskaper
Tabellen visar viktiga egenskaper som ofta tas i beaktning när man väljer mätteknik. Vi visar en inbördes rangordning mellan enkoderteknologier, resolvrar, potentiometrar, halleffektsensorer och kapacitiva sensorer för varje enskild egenskap. Rangordningen sträcker sig från 1-7 där 1 är bäst.
Introduktion till enkodrar eller pulsgivare som de också kallas
Roterande enkodrar är idealiska för att mäta en axels vinkelposition eller en axels linjärförflyttning med mycket hög precision när det samtidigt finns behov av snabb responstid för reglersystemet. Magnetiska, optiska och induktiva enkodrar eller pulsgivare som de också kallas, har väsensskilda konstruktioner. Detta ger ofta goda möjligheter att hitta en pulsgivare som lämpar sig väl för en specifik tillämpning och miljö. Enkodrar går vidare att dela in i 2 huvudkategorier – inkrementella och absoluta.
Inkrementella enkodrar ger relativ positionsinformation och räknar antalet pulser när axeln roterar. Här bestäms den absoluta positionen med utgång från en känd referenspunkt.
Absoluta enkodrar har fördelen att de anger den absoluta positionen för axeln vid varje given tidpunkt. Det sker genom att det för varje position på axeln finns en motsvarande unik kod. Eftersom de inte kräver någon referenspunkt slipper man exempelvis att göra en hemmalägessökning vid eventuell omstart av ett system.
1. Magnetiska pulsgivare
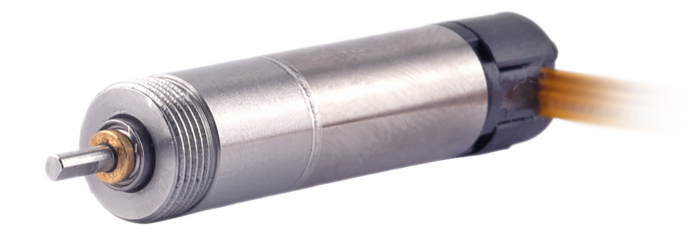
Borstlös DC-motor med integrerad inkrementell magnetisk pulsgivare.
Magnetiska enkodrar eller pulsgivare, har framför allt fördelen att de är kostnadseffektiva och robusta. Den här typen av pulsgivare fungerar väl i miljöer som är smutsiga och mekaniskt påfrestande, vilket gör dem lämpade även för krävande industriella applikationer. Att de är kostnadseffektiva kan vara en särskild fördel när budgeten är begränsad. Till nackdelarna hör begränsningar när det gäller upplösning och noggrannhet i jämförelse med andra typer av pulsgivare. De är även känsliga för magnetiska störningar på så sätt att noggrannheten kan påverkas.
2. Optiska pulsgivare

Högupplösta, absoluta, minimala, optiska pulsgivaren Aura.
Här hittar du högsta möjliga upplösning och noggrannhet i kombination med kompakt design & lång livslängd. Dessa egenskaper gör optiska enkodrar mycket väl lämpade för utrymmessnåla applikationer med höga precisionskrav. Till nackdelarna hör att de kan vara känsliga för damm, smuts och föroreningar, vilket gör att de lämpar sig bättre i renare utrymmen och miljöer. Man kan dessutom behöva beakta att enkoderns skiva och sensor kan vara känsliga för mekanisk skada.
3. Induktiva enkodrar

Zettlex induktiva enkodrar har inga känsliga delar och kräver inget underhåll.
Induktiva enkodrar erbjuder, likt de optiska, mycket hög upplösning och noggrannhet vilket gör dem lämpliga för applikationer med högre krav på precision. En fördel med induktiva enkodrar är den beröringsfria teknologin och enkel, robust design. Dessa egenskaper gör dem lämpade för långvarig användning där man är ute efter tillförlitlig precision i extrema miljöer utan underhåll.
Underhållsfria absoluta induktiva Zettlex enkodrar lämpar sig för ytterst tuffa förhållanden, länk.
4. Resolvrar
Resolvrar är elektromekaniska enheter bestående av stator och rotor som vanligen är sammansatta av trådlindade spolar. De fungerar genom att statorn genererar ett magnetfält och rotorn, som vanligen är kopplad till den roterande delen av maskineriet, samverkar med detta magnetfält.
Medan induktiva enkodrar, som också är kända för sin motståndskraft i miljömässigt riktigt tuffa miljöer, så kan resolvrar ofta uppvisa högre motståndskraft när det gäller extrema temperaturer, vibrationer och mekaniska påfrestningar.
Nackdelar med resolvrar jämfört med enkodrar, är typiskt sett att de kräver mer komplex (analog) signalbehandling jämfört med digitala enkodrar. De erbjuder inte heller lika hög upplösning och noggrannhet.
Sammanfattningsvis beror valet mellan resolver och induktiv enkoder på de specifika kraven för applikationen. Resolvrar kan vara lämpade i applikationer med krav på hållbarhet & motståndskraft under extrema förhållanden, som flyg- och bilsystem.
Induktiva enkodrar är desto mer lämpliga i applikationer där det både finns krav på hög upplösning och noggrannhet i kombination med tuffa miljökrav, som exempelvis precisionsindustrimaskiner och militära applikationer. Enkodrarna har dessutom fördelen att de är underhållsfria och tillförlitliga över tid, tack vare beröringsfri teknologi och enkel design med färre delar som utsätts för slitage.
5. Potentiometrar
Potentiometrar fungerar som positionssensorer i rörelsekontrollsystem och omvandlar mekanisk förskjutning till elektriska signaler. De fungerar genom ett resistivt spår och en rörlig så kallad wiper som ändrar motståndet när den länkade mekaniska komponenten rör sig. Anslutna i en spänningsdelarkrets, producerar de en utspänning som motsvarar komponentens position.
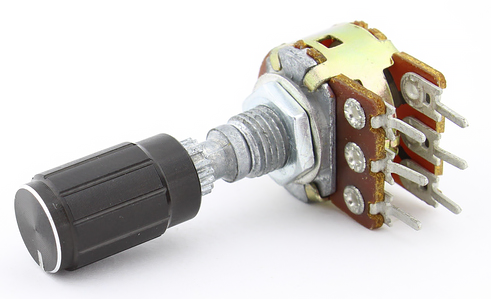
Enkelhet och kostnadseffektivitet gör potentiometrar lämpliga för applikationer som volymkontroll inom hemelektronik och grundläggande robotik där de kan användas för positionsåterkoppling i enkla motorstyrsystem och robotleder.
Potentiometrar har dock begränsningar. De uppfyller exempelvis inte precisionskraven som ställs på högprecisions- eller höghastighetsapplikationer. Slitage och mekaniska rörelser kan dessutom påverka noggrannheten över tid och reducera applikationens livslängd. Tillförlitlighet och livslängd kan också påverkas av komponentens känslighet för temperaturskillnader, luftfuktighet, damm och vibrationer.
Sammanfattningsvis kan man säga att även om potentiometrar är kostnadseffektiva och enkla, så är sofistikerade sensorer som enkodrar att föredra i applikationer som robotik, CNC-maskiner, industriell automation och där det råder högre krav på hållbarhet och mer exakt rörelsekontroll.
6. Halleffektsensorer / Hybridlösningar
Halleffektsensorer är en del av en magnetisk enkoder men även en viktig komponent i borstlösa DC-motorer där de används för att styra motorns kommutering.
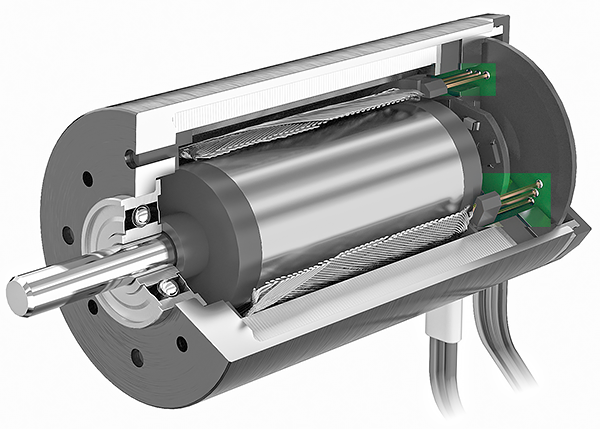
BLDC motor med halleffektsensorer
Genom smarta lösningar kan man kombinera funktionerna så att samma hallsensorer används både för kommutering och som magnetisk enkoder. Detta ger en integrerad lösning som tar minimalt med utrymme.
Läs om FAULHABERs BLDC-motorer med analoga Hallsensorer som option.
7. Kapacitiva sensorer
Kapacitiva sensorer mäter position genom att detektera förändringar i kapacitans mellan elektroder utan fysisk kontakt. De fungerar genom att känna av förändringar i kapacitansen orsakade av objekts närhet eller förändringar i dielektriskt material.
Deras fördelar inkluderar beröringsfri drift och motståndskraft mot damm och fukt. Likt enkodrar erbjuder kapacitiva sensorer hög upplösning, men kan däremot ha begränsningar i avkänningsräckvidd och kan påverkas av närliggande material, vilket kan påverka noggrannheten.
Enkodrar erbjuder generellt större mångsidighet även om kapacitiva enheter står sig bra jämfört med många andra komponentval. I regel är de inte lika tillförlitliga som induktiva enkodrar i tuffare miljöer med höga temperaturvariationer, stötar och vibrationer.
Föredrar du att få hjälp av en specialist?
Vi hjälper dagligen våra kunder med att hitta rätt mätteknik för robotarmar, medicinska instrument, CNC-maskiner, tillverkningsutrustning och helt andra applikationer.
Hör av dig när du vill diskutera den teknik som passar bäst i just din applikation.
