7 tekniker för att åstadkomma linjär rörelse med elmotorer
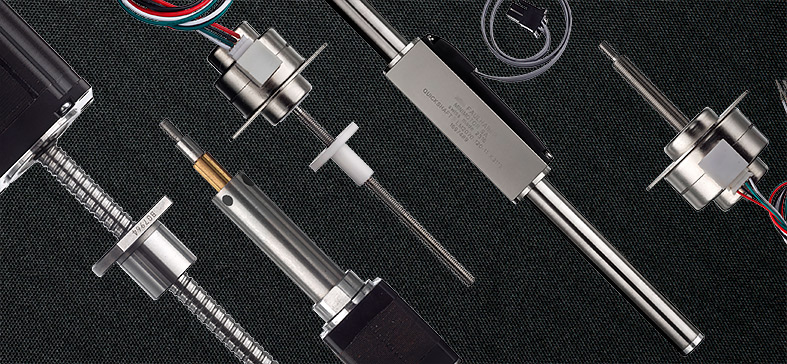
Många applikationer för elmotorer handlar om att omvandla en roterande rörelse till en linjär rörelse, t.ex. i ställdon, XY-bord, zoom eller fokus i optiska tillämpningar m.m. Detta kan göras på många olika sätt, med olika för- och nackdelar, och som lämpar sig för olika applikationer. Väljer du fel metod kan du få problem med för dålig noggrannhet, för låg hastighet eller en för dyr totallösning. Väljer du istället rätt kan du bygga en produkt med bättre prestanda än konkurrenternas eller som är prismässigt mer konkurrenskraftig. I bästa fall till och med en kombination av dessa. I denna artikel tittar vi på några vanliga metoder för att åstadkomma linjära rörelser med elmotorer.

·