Styrning av H-robotar
Det finns många applikationer som kräver förflyttning i ett plan, eller rörelse längs två vinkelräta axlar. Ett sådant tvådimensionellt system kan utrustas med ytterligare motorer för att öka antalet frihetsgrader. Denna typ av tillämpningar återfinns i allt från positionering av prover för mikroskop och 3D-skrivare till förpackning och materialdispensering. Det vanligaste sättet att åstadkomma rörelse i ett plan är att använda en maskin baserad på ett XY-steg eller ett gantrysystem. Denna typ av system kan ha många nackdelar som täcks senare i denna artikel. Ett alternativ till dessa typer av maskiner är H-roboten, vilken har många fördelar jämfört med XY-steg och gantrysystem. Denna artikel diskuterar för- och nackdelar med att använda en H-robot för plana rörelser såväl som Galils DMC-40×0-firmware för H-robotar.
När en ingenjör eller maskinkonstruktör har behov av att förflytta en last i ett plan kan man använda en motor för att åstadkomma förflyttningen i en riktning. Två sådana enaxliga system kan staplas ortogonalt på varandra för att åstadkomma en rörelse i planet. Det finns många sätt att göra en förflyttning i en axel; ledarskruv, linjärmotor, remdrift, kuggstång m.fl. Om lasten är för stor för att flytta med en motor kan två motorer användas längs samma axel. Denna typ av lösning brukar kallas gantry.
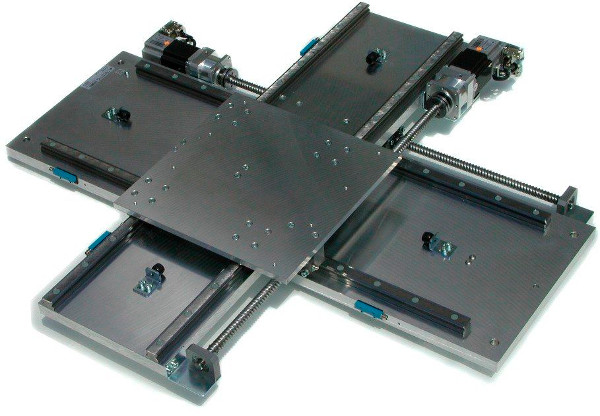
XY-bord
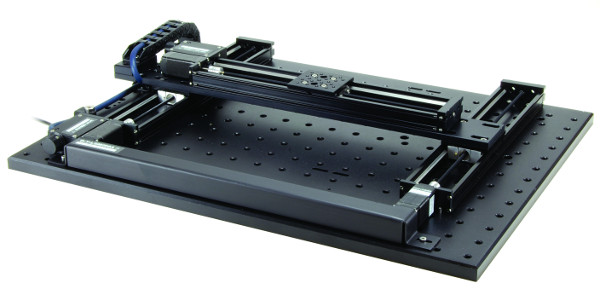
Gantrysystem
Nackdelar med traditionella XY-system
Att stapla ortogonala system på detta sätt har många nackdelar. Ledarskruvar är kostsamma och introducerar ytterligare friktion vilket kräver större, dyrare motorer. Linjärmotorer kan vara väsentligt mycket dyrare än roterande motorer. Att montera systemet blir komplext eftersom ett system måste rida ovanpå det andra. Att montera dessa system innebär ökad konstruktions- och tillverkningskomplexitet, vilket resulterar i ökad maskinkostnad. Med en axel monterad ovanpå den andra ökar också systemets tröghet och lasten på en motor blir oproportionerlig jämfört med den andra motorn. Lasten på vardera motor förändras med positionen i vissa XY-steg och den ökade lasten kan orsaka inkonsekventa eller stora förskjutningsfel i slutet av slaglängden.
Positionsfel kan också uppstå då de ortogonala axlarna är felriktade. Detta adderar snävare komponenttoleranser vilket kan öka tillverkningskostnaden. Att ändra slaglängd i denna typ av system är ofta svårt eller omöjligt när de väl är konstruerade vilket för dem mindre flexibla med system som behöver vara modulära. När man använder ledarskruvar måste motorerna vara monterade i linje med skruvarna, vilket kan innebära serviceproblem då maskinen är i närheten av andra maskiner eller en vägg. Avslutningsvis har XY-steg en liten arbetsyta i förhållande till sin totala storlek. Vissa av dessa problem kan åtgärdas med ett gantry, vilket istället har kostnadsnackdelen att man introducerar en ytterligare motor.
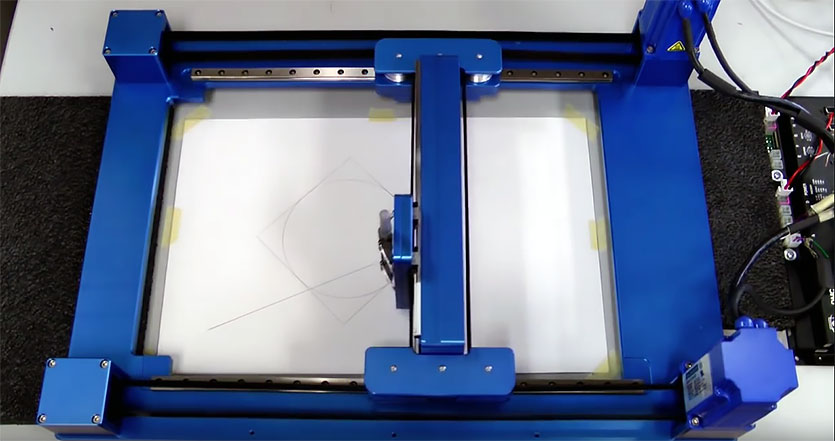
H-roboten
Ett alternativ till staplade system är H-roboten, vilken för med sig många fördelar jämfört med ett XY-bord eller ett gantry. H-roboten är snarlik ett gantry, men med några distinkta skillnader. Två motorer används för att flytta en kuggrem som dras genom ett system av kuggremhjul. Remmen fästs i vagnen som rör sig längs en axel. Denna styrning monteras sedan på två andra set av styrningar liknande den i ett gantry för att möjliggöra rörelse i den ortogonala riktningen. Vagnen flyttas i XY-planer genom koordinerad matning av kuggremmarna i remhjulsystemet.
Detta står i kontrast till XY-bordet där rörelse i X eller Y åstadkoms genom att flytta den enda motorn som styr den axeln. H-robotar kan konstrueras för att erbjuda samma funktionalitet som ett XY-bord eller gantry, men utan många av nackdelarna hos dessa.
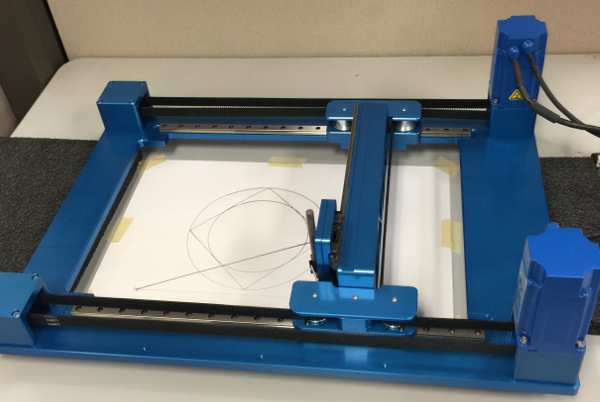
H-robot
XY-rörelsen i en H-robot kan kombineras med andra komponenter för att anpassa den till många typer av tillämpningar. Användingsområden för H-robotar kan inkludera punkt-till-punkt-positionering, pick and place, materialfylldnad och -applicering, planar eller tredimensionell skärning och många fler.
Konstruktion
Hur vagnen eller lasten positioneras illustreras enklast med en schematisk skiss som visar en vanlig typ av konstruktion av H-robotar.
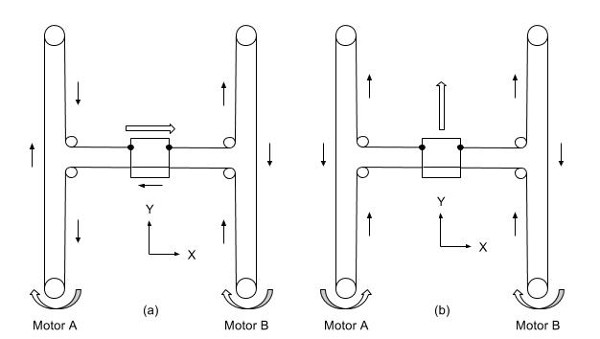
Vertikal och horisontell rörelse i H-robot
Figuren visar att vagnen, avbildad som en rektangel, är fäst på ena eller andra sidan av en kuggrem. Remmen matas genom ett system av totalt sex remhjul och två motorer. Vagnen kommer att röra sig i sidled längs ett gantry som fritt rör sig i höjdled, vilket möjliggör total frihet i planet. Figuren till vänster visar hur en rörelse i positiv X-riktning kan åstadkommas genom att vrida både motor A och motor B medsols, lika mycket och i samma hastighet. Figuren till höger visar hur en förflyttning i positiv Y-riktning åstadkoms genom att visa både motor A och motor B lika mycket i motsatta riktningar och i samma hastighet. Icke-ortogonal rörelse kräver insatser från båda dessa fundamentala rörelser av båda motorerna. Att bestämma motorpositionen som krävs för att nå en slutlig position är matematiskt definierad och kallas för inverterad kinematik.
För- och nackdelar
Det finns många egenskaper som kan göra en H-robot en ideal lösning kontra XY-bord eller gantry:
- Ökad andel användbar arbetsyta i förhållande till total maskinstorlek. Eftersom konstruktionen med en H-robot använder kuggremmar och kuggremhjul blir den totala storleken av systemet väsentligt mindre. Motorerna monteras ofta vinkelrätt mot arbetsytan, vilket sparar utrymme. Till skillnad från ett XY-bord är de ortogonala axlarna inte staplade, vilket kan spara i vertikalt utrymme också.
- Kostnadsreduktion tack vare flera faktorer:
– Mindre kostsamma remhjul används istället för ledarskruvar
– Kuggremmar kostar väsentligt mycket mindre än ledarskruvar eller linjärmotorer, vilket reducerar investeringar och underhållskostnader
– Axlarna staplas inte på varandra som i ett XY-bord eller gantry. Detta reducerar totalvikt och komplexitet. Denna reduktion av komponenter och material sparar in H-robotens konstruktionskostnader. En viktreduktion innebär att man kan välja mindre motorer, vilket sparar ytterligare.
– En lättare konstruktion medför den ytterligare fördelen av ökad prestanda med mindre massa att accelerera. - Två motorer delar samma last, likt ett enaxligt gantrysystem. Denna lastdelning gör systemet balancerat, därför kan två identiska motorer användas.
- Att ersätta ledarskruvar med remdrift reducerar friktionen i systemet. Detta reducerar slitage och driftkostnader.
- H-roboten kan konstrueras modulärt. Arbetsytan kan göras större eller mindre beroende på längden av skenstyrningarna och längden på kuggremmen. Ett remspänningshjul kan bli nödvändigt för att bibehålla remspänningen.
- Förändringar i hastighet eller nogrannhet kan åstadkommas genom att ändra diameter på remhjulet, vilket ofta är enklare än att byta stigning på ledarskruven eller encoderupplösning.
- Motorernas placering kan väljas med hänsyn till utrymmeskrav eller tillgänglighet.
- Mindre kostsamma roterande motorer kan användas istället för kostsamma linjärmotorer.
Med alla fördelar som H-roboten medför kontra ett vanligt XY-system kommer även några nackdelar. Den främsta nackdelen är att rörelsen i en H-robot kräver att man omvandlar meningsfulla XY-koordinater eller rörelser, till motorpositioner och motorrörelser. Detta adderar beräkningsmässig komplexitet till maskinstyrningen eftersom alla rörelser måste koordineras mellan två motorer. Utöver profilerad rörelse hos två motorer måste båda motorerna starta och stanna samtidigt. På grund av den sammanlänkade konstruktionen måste särskild hänsyn tas till säkerhet för gränslägen. För att kunna stoppa rörelsen måste två motorer retardera koordinerat. Kuggremmen kan introducera positionsfel vid last på grund av sin flexibilitet. Denna typ av positionsfel är snarlikt det glapp som återfinns i en ledarskruv och kan reduceras genom att använda högkvalitativa kuggremmar med rätt kord och korrekt remspänning.
Galils nya firmware för H-robotar
Galil har eliminerat den beräkningsmässiga komplexiteten och säkerhetsbeaktandet genom att utveckla en firmware för H-robotar för serien DMC-40×0, som gör användandet av en H-robot transparent för användaren. I följande sektion beskriver vi funktioner med referens till Galils tvåbokstavskommandon. När positionen definieras (DP) eller när man begär referensposition (RP) görs detta alltid sett utifrån XY-koordinater i planet. Eftersom de två motorerna är ihopkopplade är båda motorerna också aktiverade (SH) respektive deaktiverade (MO) tillsammans, även om man endast begär en sådan ändring av en av axlarna.
Enaxliga eller oberoende rörelsekommandon i ett XY-bord används på H-roboten med samma resulterande rörelse. Att skicka kommando för att jogga (JG), relativ (PR/IP) eller absolut positionering (PA) som innebär förflyttning längs en axel koordinerar automatiskt rörelsen mellan två motorer för att uppnå begärd rörelseprofil i den riktningen. Att köra vektorförflyttningar (VM) använder samma syntax och kommandon som vanliga XY-system. Precis som i fallet med individuella förflyttningar används båda motorerna koordinerad för att åstadkomma en vektorförflyttning. Motorn eller XY-positionen kan användas även med utväxling, vilket gör H-roboten flexibel nog att anpassas till applikationer som använder elektronisk utväxling och ytterligare motorer. Att trigga en gränslägesbrytare resulterar alltid i en koordinerad retardation av båda motorerna för att stoppa den axeln. Funktionen off-on-error (OE) påverkar även den båda motorerna.
Hemmalägessökning på H-roboten görs genom att man använder hitta flank-funktionen (FE) för att se övergången i hemmalägesbrytaren. Som med alla Galil-controllers finns det även frihet att skriva egna sekvenser för hemmalägessökning. PID-filtret har också modifierats för att förenkla tuning av systemet för önskat svar. Den framkopplade hastigheten (FV) och den framkopplade accelerationen (FA) specificeras för XY-axlar, inte för individuella motorer. Båda motorerna delar lasten i systemet, mnen det är olika stor tröghet när man rör vagnen eller när man flyttar längs gantryt. Genom att låta den framkopplade biasen gälla för axlar istället för motorer kan man låta dessa skillnader i tröghet kompenseras för i reglerloopen. Den totala biasen som tillförs till varje motor beror på den framkopplade förstärkningen för XY-axlarna och komponenten av antingen hastighet eller acceleration längs dessa axlar. Denna förändring av PID-loopen är nödvändig för att åstadkomma fördelen med framkopplad förstärkning i en H-robot.
Sammanfattning
Avslutningsvis medför en H-robot många fördelar i en tillämpning med rörelse i ett plan. Denna ytrörelse kan kombineras med andra axlar på samma sätt som i ett staplat XY-bord. Konstruktionen av en H-robot är förenklad jämfört med vanliga XY-lösningar, vilket resulterar i färre komponenter, mindre material, lägre vikt och kostnad och reducerat underhållskrav. Allt detta är stora fördelar kontra ett XY-bord eller gantry. Nackdelarna med att använda en H-robot i en applikation härrör till robotens sammankopplade motorer, vilket kräver en mer komplex styrning. Galil har utvecklat en firmware som adresserar dessa komplexiteter och gör styrningen av en H-robot, sett ur användarperspektiv, oskiljbart från styrningen av ett standardsystem. Att byta till denna typ av lösning i en befintlig tillämpning kan göras med minimala förändringar i ett befintligt program. Både nya och befintliga H-robotsystem kan dra fördelar av den enkla användningen som Galils nya firware erbjuder.
Kontakta oss om du vill använda den nya funktionen i en ny eller befintlig tillämpning.
Denna artikel publicerades ursprungligen av Galil Motion Control.
