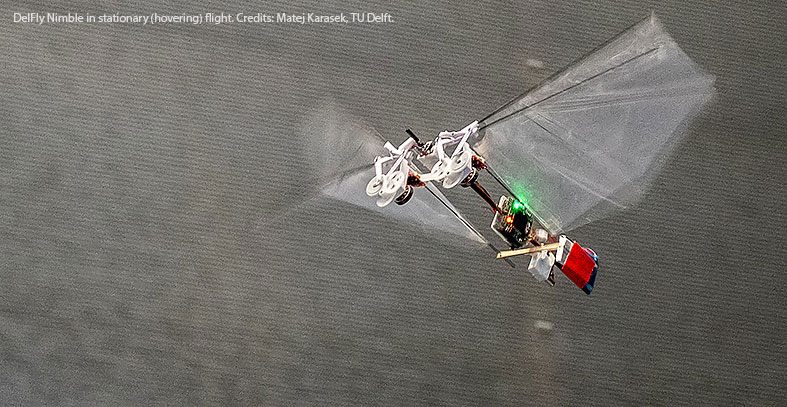
Veckans häftigaste: Flygande autonom insektsrobot – DelFly Nimble
Missa inte DelFly Nimble – som kan vara det häftigaste jag har sett – den här veckan!
Efter att ha sett youtube klippet måste man tillstå att flygtekniken med de fladdrande vingarna, vridningen av vingarna och den komplexa aerodynamiken ger denna robot förvånansvärt insektsliknande manövrar!
Roboten, som är autonom, har en toppfart om 25 km/h och klarar 5 minuters svängningsflygning alternativt 1 km distansflygning på fulladdat batteri – faktorer som ger tekniken stor framtidspotential enligt utvecklarna.
The Micro Air Vehicle Laboratory – MAVLab har utvecklat insektinspirerade flygrobotar i över 10 år inom DelFly-projektet. Enligt Professor Guido De Croon, vetenskaplig ledare för MAVLab, har nya DelFly Nimble, som utvecklats av forskare på TU Delft som ingår i MAVLab, mycket goda framtidsutsikter för nya typer av applikationer då den skall vara säkrare och flyga mer effektivt än traditionella drönare. Den kompletta artikeln hos TU Delft finns här.
Vi tror också att det finns stor potential för drönare av den här typen. Vad tror du? Bygger du också robotar som behöver vara snabba, ha extremt låg vikt eller som är lite allmänt läskiga? Hör av dig. Våra elmotorer, styrningar och växlar kan förmodligen hjälpa dig att förverkliga dina visioner.

White Paper: Olika metoder för återkopplad styrning av stegmotorer
Stegmotorer används i många olika typer av tillämpningar eftersom de är kostnadseffektiva, enkla att köra och erbjuder högt moment vid låga hastigheter. Tyvärr har de även några nackdelar såsom förlorade steg, lågt moment vid höga hastigheter, resonans och hög strömförbrukning. För att bättre hantera dessa nackdelar har Galil tre olika metoder för att köra en stegmotor i en återkopplad servoloop: Slutpositionskorrigering, återkopplad mikrostegning och att köra stegmotorn som en 2-fas borstlös motor.
I detta white paper förklarar Galil Motion Control hur detta fungerar och när man bör välja de olika typerna av metoder.

White Paper: Kompensera för externa krafter i motorstyrningsapplikationer
När en extern kraft appliceras i ett system är det inte säkert att det räcker med standard PID-parametrar för att kompensera för det. För att bättre förstå hur man kan angripa detta problem har vår partner Galil Motion Control ställt upp fyra applikationer med extern kraft, som analyseras och en effektiv lösning presenteras för varje applikation. Dessa applikationer inkluderar servomotorer som flyttar en vertikal last, en fjäderkraft, en hävarm och en komprimerbar substans.
Galil får bättre stöd för Linux
Galils senaste generation mjukvara får nu stöd även för Linux.
Läs mer
Webinar: Så använder du Raspberry Pi tillsammans med Galils motorstyrningar
Tack vare den senaste tidens utveckling inom enkortsdatorer är det nu enklare och mer kostnadseffektivt än någonsin att integrera en kraftfull dator i din maskin. The Raspberry Pi Foundation och deras enkortsdator Raspberry Pi, framför allt, har lagt grunden för denna typ av dator. Denna lågkostnadsplattform inbjuder till frågan vad den har för roll i automationsindustrin. Compotechs partner Galil Motion Control bjuder in till ett kostnadsfritt webinar där man kommer att diskutera var Raspberry Pi passar in och hur den kan användas tillsammans med Galils högpresterande motorstyrningar och PLCer.
Så styr du en Galil motorstyrning från en Raspberry Pi

Figur 1: Touchskärm och motorstyrning
Ett HMI (Human-Machine Interface) eller användarinterface behövs i många motorstyrningstillämpningar. Dessa enheter används för att ge användare en möjlighet att instruera en maskin hur den ska bete sig, men utan behov av en komplett PC. Ett HMI är ofta touchbaserat vilket gör att de kan placeras på produktionsgolvet och användas av tekniker direkt vid maskinen. Det finns mängder med olika HMI-produkter och de kan ibland kosta tiotusentals kronor. Med ankomsten av Raspberry Pi har det dykt upp ett litet men kraftfullt alternativ. Tillsammans med Raspberry Pi Foundations nya 7″ display och Galils API utgör denna kraftfulla trio grunden till ett kostnadseffektivt men kraftfullt HMI som kan anpassas till att fungera med alla sorters motorstyrningsbehov.
Nya generationen motorstyrningar söker intresserade ingenjörer!
Se senaste filmen när FAULHABER visar prov hur man kan dra nytta av den kompatibilitet och flexibilitet som den nya generationen motorstyrningarna ger.
Företaget höjer nivån rejält för vad man kan uppnå i form av decentraliserad intelligens och kapacitet för realtidskommunikation inom processtyrningsteknologin.

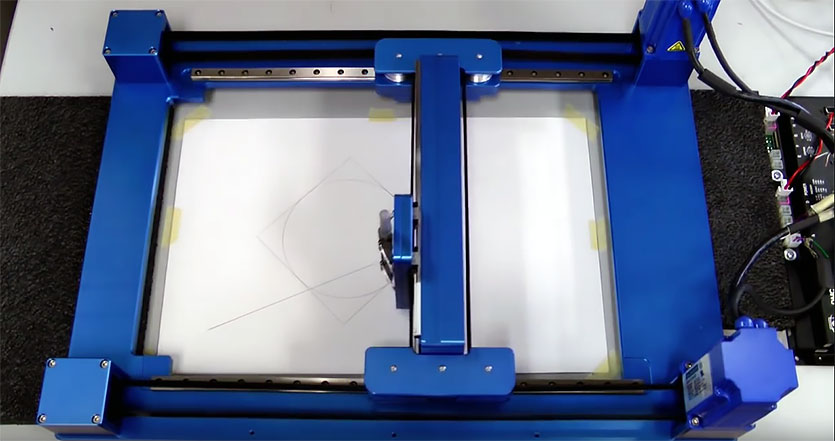
Styrning av H-robotar
Det finns många applikationer som kräver förflyttning i ett plan, eller rörelse längs två vinkelräta axlar. Ett sådant tvådimensionellt system kan utrustas med ytterligare motorer för att öka antalet frihetsgrader. Denna typ av tillämpningar återfinns i allt från positionering av prover för mikroskop och 3D-skrivare till förpackning och materialdispensering. Det vanligaste sättet att åstadkomma rörelse i ett plan är att använda en maskin baserad på ett XY-steg eller ett gantrysystem. Denna typ av system kan ha många nackdelar som täcks senare i denna artikel. Ett alternativ till dessa typer av maskiner är H-roboten, vilken har många fördelar jämfört med XY-steg och gantrysystem. Denna artikel diskuterar för- och nackdelar med att använda en H-robot för plana rörelser såväl som Galils DMC-40×0-firmware för H-robotar. Läs mer
Humanoida robotar – hur lika oss kan de bli?
Människoliknande robotar har ett handikapp redan från början eftersom själva rörelserna som krävs för att ta sig fram på två ben är mycket mer komplicerat än att ta sig fram på hjul. Att ta sig fram på två ben kräver en exakt rörelse, något som även vi människor behöver ett första levnadsår för innan vår motorik är så pass utvecklad att vi faktiskt kan gå. För de som både kan och vågar sig på att gå ett par månader tidigare innan alla basala funktioner är tillräckligt utvecklade, som fallskyddsreflexen till exempel, innebär vår gång förhoppningsvis inte fler törnar än ett par blåmärken. När vi väl får till samspelet mellan de cirka 200 muskler som är involverade när vi går, behöver alla dessa samarbeta med komplicerade leder och specialiserade områden i vår hjärna som styr gången. Läs mer
Kommer ett fotbollslag med robotar någonsin slå världsmästarna?
RoboCup är en årlig tävling för att stimulera forskning inom robotteknik och artificiell intelligens och främja samarbetet mellan olika forskarlag. Initiativet drogs igång i mitten av 90-talet, med det officiella målet att skapa ett fotbollslag av autonoma humanoida robotar som på sikt till och med ska kunna vinna över de regerande världsmästarna i fotboll – året 2050 nämns som en möjlighet. Läs mer