
Webinar: Olika metoder för återkopplad styrning av stegmotorer
Lär dig skilda metoder för återkopplad styrning av stegmotorer. Stegmotorer används i många olika typer av tillämpningar eftersom de är kostnadseffektiva, enkla att köra och erbjuder högt moment vid låga hastigheter. Tyvärr har de även några nackdelar såsom förlorade steg, lågt moment vid höga hastigheter, resonans och hög strömförbrukning. För att bättre hantera dessa nackdelar har Galil tre olika metoder för att köra en stegmotor i en återkopplad servoloop: Slutpositionskorrigering, återkopplad mikrostegning och att köra stegmotorn som en 2-fas borstlös motor.
Använd gärna det inspelade webinariet som introduktion, här visar Galil Motion Control hur de olika metoderna fungerar.
Är du mer hjälpt av Galils white paper om ämnet? Ladda ned ditt eget exemplar via länken.

White Paper: Olika metoder för återkopplad styrning av stegmotorer
Stegmotorer används i många olika typer av tillämpningar eftersom de är kostnadseffektiva, enkla att köra och erbjuder högt moment vid låga hastigheter. Tyvärr har de även några nackdelar såsom förlorade steg, lågt moment vid höga hastigheter, resonans och hög strömförbrukning. För att bättre hantera dessa nackdelar har Galil tre olika metoder för att köra en stegmotor i en återkopplad servoloop: Slutpositionskorrigering, återkopplad mikrostegning och att köra stegmotorn som en 2-fas borstlös motor.
I detta white paper förklarar Galil Motion Control hur detta fungerar och när man bör välja de olika typerna av metoder.

White Paper: Kompensera för externa krafter i motorstyrningsapplikationer
När en extern kraft appliceras i ett system är det inte säkert att det räcker med standard PID-parametrar för att kompensera för det. För att bättre förstå hur man kan angripa detta problem har vår partner Galil Motion Control ställt upp fyra applikationer med extern kraft, som analyseras och en effektiv lösning presenteras för varje applikation. Dessa applikationer inkluderar servomotorer som flyttar en vertikal last, en fjäderkraft, en hävarm och en komprimerbar substans.
Galil får bättre stöd för Linux
Galils senaste generation mjukvara får nu stöd även för Linux.
Läs mer

Webinar: Så använder du Raspberry Pi tillsammans med Galils motorstyrningar
Tack vare den senaste tidens utveckling inom enkortsdatorer är det nu enklare och mer kostnadseffektivt än någonsin att integrera en kraftfull dator i din maskin. The Raspberry Pi Foundation och deras enkortsdator Raspberry Pi, framför allt, har lagt grunden för denna typ av dator. Denna lågkostnadsplattform inbjuder till frågan vad den har för roll i automationsindustrin. Compotechs partner Galil Motion Control bjuder in till ett kostnadsfritt webinar där man kommer att diskutera var Raspberry Pi passar in och hur den kan användas tillsammans med Galils högpresterande motorstyrningar och PLCer.
Så styr du en Galil motorstyrning från en Raspberry Pi

Figur 1: Touchskärm och motorstyrning
Ett HMI (Human-Machine Interface) eller användarinterface behövs i många motorstyrningstillämpningar. Dessa enheter används för att ge användare en möjlighet att instruera en maskin hur den ska bete sig, men utan behov av en komplett PC. Ett HMI är ofta touchbaserat vilket gör att de kan placeras på produktionsgolvet och användas av tekniker direkt vid maskinen. Det finns mängder med olika HMI-produkter och de kan ibland kosta tiotusentals kronor. Med ankomsten av Raspberry Pi har det dykt upp ett litet men kraftfullt alternativ. Tillsammans med Raspberry Pi Foundations nya 7″ display och Galils API utgör denna kraftfulla trio grunden till ett kostnadseffektivt men kraftfullt HMI som kan anpassas till att fungera med alla sorters motorstyrningsbehov.
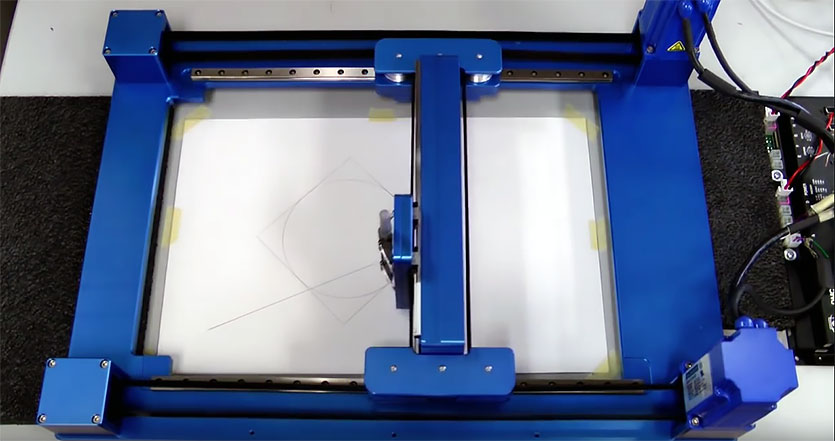
Styrning av H-robotar
Det finns många applikationer som kräver förflyttning i ett plan, eller rörelse längs två vinkelräta axlar. Ett sådant tvådimensionellt system kan utrustas med ytterligare motorer för att öka antalet frihetsgrader. Denna typ av tillämpningar återfinns i allt från positionering av prover för mikroskop och 3D-skrivare till förpackning och materialdispensering. Det vanligaste sättet att åstadkomma rörelse i ett plan är att använda en maskin baserad på ett XY-steg eller ett gantrysystem. Denna typ av system kan ha många nackdelar som täcks senare i denna artikel. Ett alternativ till dessa typer av maskiner är H-roboten, vilken har många fördelar jämfört med XY-steg och gantrysystem. Denna artikel diskuterar för- och nackdelar med att använda en H-robot för plana rörelser såväl som Galils DMC-40×0-firmware för H-robotar. Läs mer
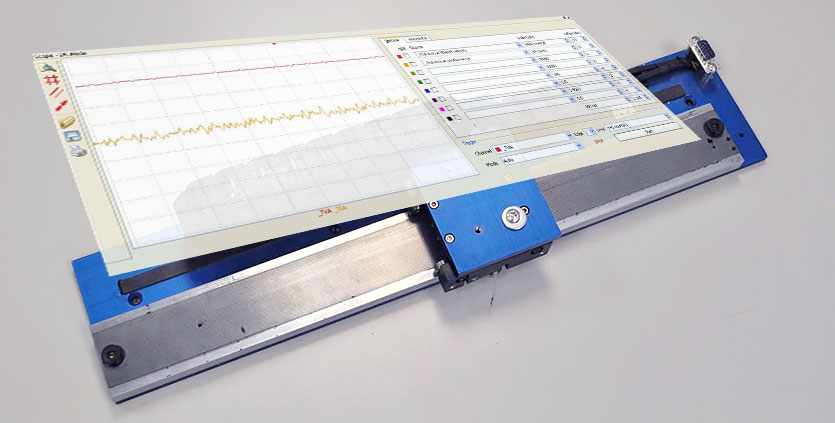
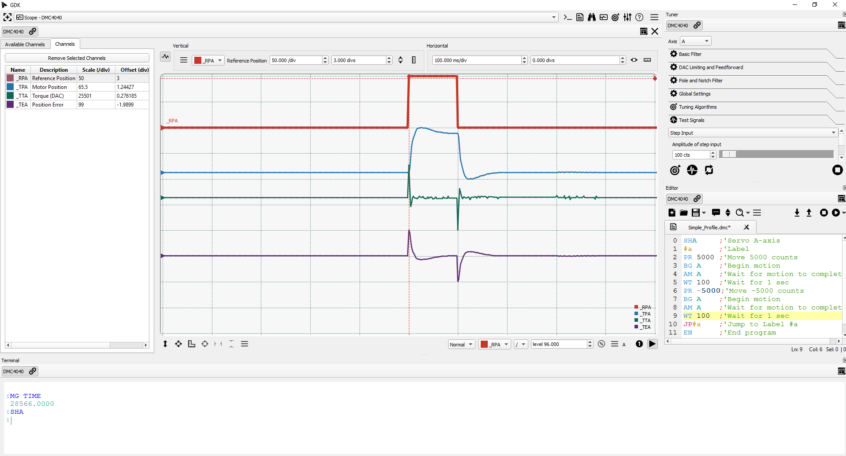
Ökad prestanda med återkopplade stegmotorer
Moderna motorstyrningar kan inkludera möjligheten att köra stegmotorer med pulsgivare som återkoppling, vilket resulterar i en äkta återkopplad servoloop. Denna typ av motorstyrning liknar mycket hur man styr vanliga 3-fas borstlösa servomotorer, där de tre faserna är förskjutna med 120 elektriska grader. Hos stegmotorer är de två faserna förskjutna med 90 elektriska grader. Några av fördelarna med återkopplad styrning av stegmotorer är betydligt jämnare hastighet, reducerad effektförbrukning jämfört med oåterkopplade stegmotorer och betydligt högre moment vid låga hastigheter än traditionella 3-fas BLDC-motorer. Läs mer

PiezoMotor lanserar controller baserad på teknologi från Galil
I dagarna släppte PiezoMotor en komplett controller/driver, särskilt anpassad för deras piezoelektriska motorer i serien Piezo LEGS®. Enheten, som har fått namnet DMC-30019, är baserad på DMC-3x01x ”pocket motion controller” från Compotechs samarbetspartner Galil Motion Control. Läs mer
Galil lanserar ny webbplats
I dagarna lanserade vår partner Galil Motion Control en ny webbplats som gör det ännu lättare att hitta kommandoreferenser, manualer, mjukvara och CAD-ritningar för Galils motorstyrningar. Webbplatsen är dessutom full av application notes, API-dokumentation och kodexempel som gör det enkelt att komma igång med en motorstyrning från Galil, även om du är nybörjare. I samband med lanseringen av den nya webbplatsen byter man även URL. Besök Galils nya webbplats på www.galil.com.