7 tekniker för att åstadkomma linjär rörelse med elmotorer
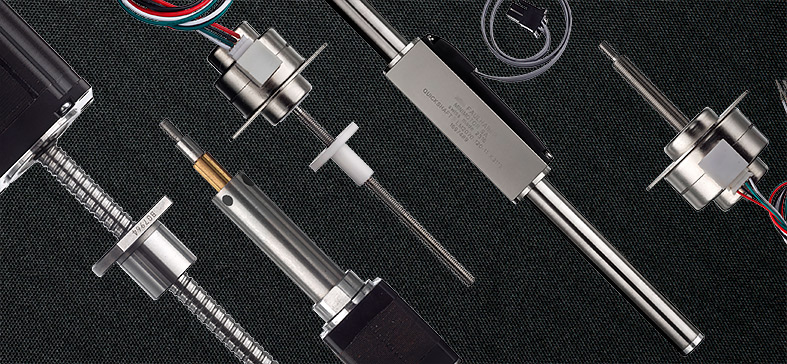
Många applikationer för elmotorer handlar om att omvandla en roterande rörelse till en linjär rörelse, t.ex. i ställdon, XY-bord, zoom eller fokus i optiska tillämpningar m.m. Detta kan göras på många olika sätt, med olika för- och nackdelar, och som lämpar sig för olika applikationer. Väljer du fel metod kan du få problem med för dålig noggrannhet, för låg hastighet eller en för dyr totallösning. Väljer du istället rätt kan du bygga en produkt med bättre prestanda än konkurrenternas eller som är prismässigt mer konkurrenskraftig. I bästa fall till och med en kombination av dessa. I denna artikel tittar vi på några vanliga metoder för att åstadkomma linjära rörelser med elmotorer.

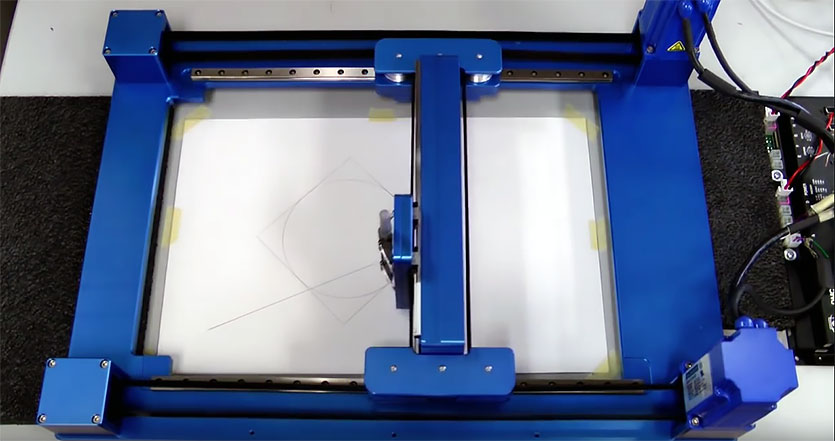
Styrning av H-robotar
Det finns många applikationer som kräver förflyttning i ett plan, eller rörelse längs två vinkelräta axlar. Ett sådant tvådimensionellt system kan utrustas med ytterligare motorer för att öka antalet frihetsgrader. Denna typ av tillämpningar återfinns i allt från positionering av prover för mikroskop och 3D-skrivare till förpackning och materialdispensering. Det vanligaste sättet att åstadkomma rörelse i ett plan är att använda en maskin baserad på ett XY-steg eller ett gantrysystem. Denna typ av system kan ha många nackdelar som täcks senare i denna artikel. Ett alternativ till dessa typer av maskiner är H-roboten, vilken har många fördelar jämfört med XY-steg och gantrysystem. Denna artikel diskuterar för- och nackdelar med att använda en H-robot för plana rörelser såväl som Galils DMC-40×0-firmware för H-robotar. Läs mer
6 mm stegmotor för optik och medicinteknik
 Med FDM0620-serien presenterar FAULHABER en stegmotor i minimal storlek i ett motorhus på endast 6mm diameter och en längd på 9,7mm med kontakten inräknad.
Med FDM0620-serien presenterar FAULHABER en stegmotor i minimal storlek i ett motorhus på endast 6mm diameter och en längd på 9,7mm med kontakten inräknad.
Denna motor sätter därmed standarden för kompakta drivsystem. Med denna kombination av minimalt utrymme och maximal kraft, tillförlitlighet och produktionskvalitet, fortsätter FAULHABER sin framgång inom området miniatyriserade drivsystem och expanderar sin stegmotorfamilj i området 6mm till 22mm med ytterligare en medlem.
Läs mer