Ladda ner guide: 7 tekniker för att åstadkomma linjär rörelse
Hur omvandlar man en roterande rörelse i en elmotor till en linjär? Och vilka faktorer måste du ta i beaktning när du väljer någon av alla metoder som finns för att göra denna omvandling? Varje teknik har både för- och nackdelar och för att din produkt ska bli framgångsrik måste inte bara den tekniska prestandan vara optimerad, utan även kostnaden. Vi hjälper dig att hitta den mest effektiva lösningen för din tillämpning i denna kortfattade guide där vi sammanställer de 7 vanligaste metoderna för att omvandla roterande rörelse till linjär rörelse.


Från ben och hajtänder till tatueringsmaskiner med högpresterande dc-motorer
Den tekniska utvecklingen inom tatueringsmaskiner har tagit stora steg framåt de senaste åren. Visste du till exempel att det går att utveckla näst intill vibrationsfria tatueringsverktyg och tatueringspennor med låg ljudnivå tack vare teknologi med dc-motorer? Hemligheten bakom maskinernas höga prestanda är bland annat motorernas låga vikt.
Nya motorstyrningar med STO-funktion ger säkerhet inom Industri 4.0 miljö
FAULHABER nyutvecklade motorstyrningar med Safe Torque Off (STO-funktion) säkerställer att strömförsörjningen till motorn omedelbart bryts och förhindrar oavsiktlig start. Läs mer

7 tekniker för att åstadkomma linjär rörelse med elmotorer
Många applikationer för elmotorer handlar om att omvandla en roterande rörelse till en linjär rörelse, t.ex. i ställdon, XY-bord, zoom eller fokus i optiska tillämpningar m.m. Detta kan göras på många olika sätt, med olika för- och nackdelar, och som lämpar sig för olika applikationer. Väljer du fel metod kan du få problem med för dålig noggrannhet, för låg hastighet eller en för dyr totallösning. Väljer du istället rätt kan du bygga en produkt med bättre prestanda än konkurrenternas eller som är prismässigt mer konkurrenskraftig. I bästa fall till och med en kombination av dessa. I denna artikel tittar vi på några vanliga metoder för att åstadkomma linjära rörelser med elmotorer.
Veckans häftigaste: kublösarrobot
Denna kublösarrobot kan vara det häftigaste jag har sett – den här veckan. Roboten är verkligen supersnabb och konstruerad av Ben Katz, student vid MIT Biomimetics Robotics Lab plus Jared DiCarlo som är forskarassistent på samma robotlabb. Den faktiska tiden – rörelsetiden ligger på bara~335 ms, nästintill en halvering av tidigare världsrekordet om 637 ms.
Bygger du också robotar? Med vårt gedigna motorprogram så kan vi förmodligen hjälpa dig att få ut ännu vassare prestanda!
Veckans häftigaste är ett återkommande tema hos oss, se exempelvis filmen som illustrerar Lenz lag.


Ny Motion controller för EtherCAT-distribuerade system!
Ny toppmodern motorförstärkare för både avancerade och enkla applikationer. Enkel anslutning med vanliga CAT5 Ethernet-kablar. Förstärkaren kan användas med Galils Ethercat master (DMC-500×0 eller DMC-52xx0) för avancerade applikationer eller med TwinCAT® om kraven är lägre. Läs mer

Luft och kabel genom stegmotorer med hålaxel
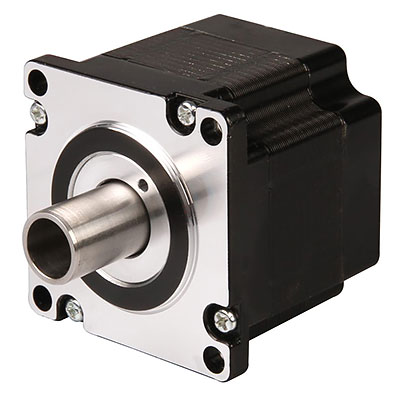 Vi är glada att kunna presentera stegmotorer med hålaxel i sex olika storlekar från NEMA 8 (20 mm fyrkant) till NEMA 34 (86 mm fyrkant). Dessa motorer lämpar sig exempelvis i robotar, pick and place-maskiner, medicintekniska instrument och andra tillämpningar där man exempelvis behöver leda luft eller kablage genom motorn. Motorerna finns i utförande med antingen 1,8 eller 0,9 graders stegvinkel. Samtliga är med 2-fas-lindning. Läs mer
Vi är glada att kunna presentera stegmotorer med hålaxel i sex olika storlekar från NEMA 8 (20 mm fyrkant) till NEMA 34 (86 mm fyrkant). Dessa motorer lämpar sig exempelvis i robotar, pick and place-maskiner, medicintekniska instrument och andra tillämpningar där man exempelvis behöver leda luft eller kablage genom motorn. Motorerna finns i utförande med antingen 1,8 eller 0,9 graders stegvinkel. Samtliga är med 2-fas-lindning. Läs mer

Webinar: Olika metoder för återkopplad styrning av stegmotorer
Lär dig skilda metoder för återkopplad styrning av stegmotorer. Stegmotorer används i många olika typer av tillämpningar eftersom de är kostnadseffektiva, enkla att köra och erbjuder högt moment vid låga hastigheter. Tyvärr har de även några nackdelar såsom förlorade steg, lågt moment vid höga hastigheter, resonans och hög strömförbrukning. För att bättre hantera dessa nackdelar har Galil tre olika metoder för att köra en stegmotor i en återkopplad servoloop: Slutpositionskorrigering, återkopplad mikrostegning och att köra stegmotorn som en 2-fas borstlös motor.
Använd gärna det inspelade webinariet som introduktion, här visar Galil Motion Control hur de olika metoderna fungerar.
Är du mer hjälpt av Galils white paper om ämnet? Ladda ned ditt eget exemplar via länken.

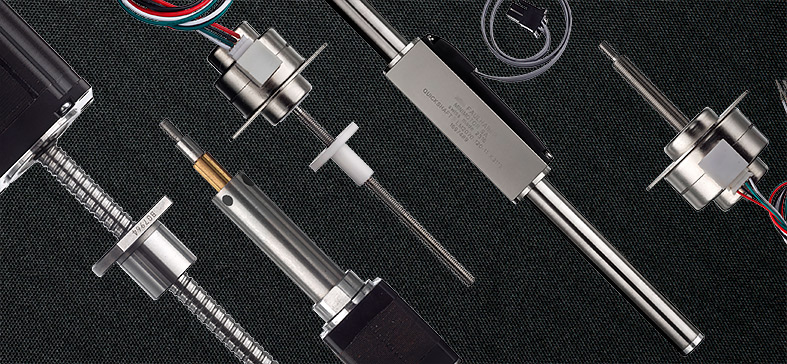
Nya linjära stegmotorer med kulskruv för högre prestanda
Utöver det redan breda programmet med ledarskruvar är nu Dings External Linear-motorer i storlek Nema8 – Nema57 även tillgängliga med kulskruv. Kulskruven medför högre dynamisk last, har högre verkningsgrad och bättre precision jämfört med ledarskruven. Läs mer